Siavash Kazemi
Karlsruher Institut für Technologie (KIT)
Institut für Technologie und Management im Baubetrieb (TMB) Geb. 50.33
Am Fasanengarten D-76131 Karlsruhe
Sascha Gentes
Karlsruher Institut für Technologie (KIT)
Institut für Technologie und Management im Baubetrieb (TMB) Geb. 50.31
Am Fasanengarten sascha.gentes@kit.edu
Zusammenfassung
Um Kernkraftwerke nach der Stilllegung rückbauen zu können, müssen alle Oberflächen dekontaminiert und freigemessen werden. Dies ist eine sehr zeitaufwändige, monotone und körperlich anstrengende Arbeit. Um dies zu vermeiden und die Sicherheit des Dekontaminationspersonals, insbesondere vor Strahlung und kontaminiertem Staub, zu gewährleisten, wurde ein mobiles Robotersystem (DekontBot) entwickelt, dass als Trägersystem für zwei Werkzeuge zur Dekontamination und Freimessung eingesetzt werden kann. Die Dekontaminationsprozesse basieren auf den geometrischen und radiologischen Informationen von einem Erkundungsrobotersystem (GammaBot).
Schlüsselwörter
Robotik, Rückbau kerntechnische Anlagen, Automatisierung, Robot Operating System (ROS)
Einleitung
Am Institut für Technologie und Management im Baubetrieb (KIT-TMB) wird an der Entwicklung einer automatisierten Prozesskette für den Rückbau kerntechnischer Anlagen geforscht. Im Rahmen des vom Bundesministerium für Bildung und Forschung (BMBF) geförderten Projektes ROBDEKON (FKZ: 13N16539) wurden verschiedene, technische Systeme für die autonome Umgebungsexploration und Detektion radioaktiver Kontaminationen, für die Dekontamination sowie die daran anschließende Freimessung entwickelt. Im Fokus dieser Arbeit steht die Entwicklung des Dekontaminationssystems an dritter Schritt der Prozesskette (DekontBot), die in Abbildung 1 dargestellt ist.

Entwicklung des Dekontaminationssystems (DekontBot)
Sensorik, Aktorik und Steuerung
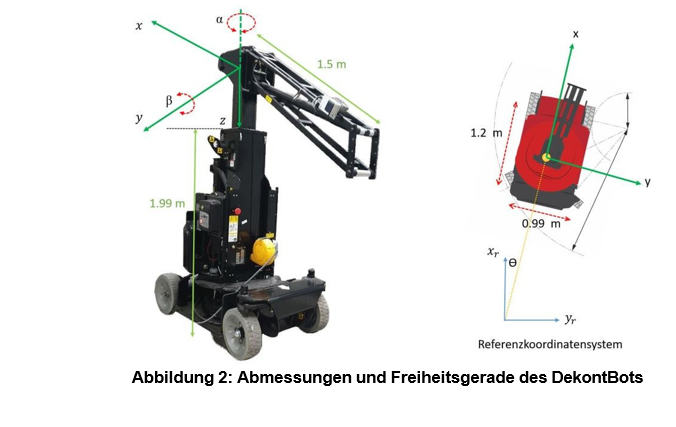
Die Aufgabe vom DekontBot ist es, die Werkzeuge zur Dekontamination und Freimessung zu positionieren. Für den Schritt Dekontamination wird neben dem DekontBot auch ein akkubetriebenes Fräswerkzeug zum Dekontaminieren der Betonwände entwickelt. Das Fräswerkzeug hat zwei Freiheitsgrade, den Fräsmotor sowie den Vorschubmotor für die seitliche Positionierung des Fräskopfes. Zu diesem Zweck wurde eine Hebebühne der Firma „Manitou“ mit den notwendigen Komponenten (Steuerung, Aktoren, Sensoren, Sicherheitstechnik und Kommunikationstechnik) ausgestattet. Die Hebebühne kann im Teleoperationsmodus, aber auch im Automatikbetrieb eingesetzt werden.
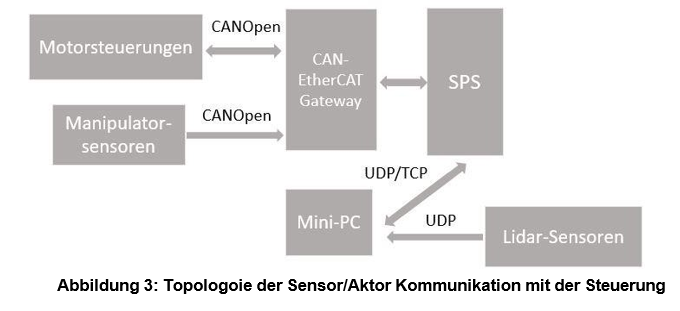
Als zentrale Steuerung dient eine EtherCAT-basierte speicherprogrammierbare Steuerung (SPS) „CtrlX-Core X3“. Die gesamte Antriebstechnik, Sensorik und Sicherheitstechnik ist auf einer SPS aufgebaut. Neben der SPS verfügt die Plattform über einen Mini-PC mit einer Core-i7-CPU. Auf dem Mini-PC sind die Visualisierungen, Lokalisierungsalgorithmen, die Kommunikation mit dem GammaBot und die Benutzeroberfläche (HMI) programmiert. Damit die Plattform sich selbst im Raum lokalisieren kann, wurden zwei sichere Lidar-Sensoren „Sick-microScan 3“ auf der Plattform montiert. Die Lidar- Sensoren liefern Rohdaten an den Lokalisierungsalgorithmus auf dem Mini-PC, und die approximierten Positionen werden in Form von „UDP“-Nachrichten an die SPS übertragen.
Entwicklung des Dekontaminationssystems (DekontBot)
Sensorik, Aktorik und Steuerung
Die Aufgabe vom DekontBot ist es, die Werkzeuge zur Dekontamination und Freimessung zu positionieren. Für den Schritt Dekontamination wird neben dem DekontBot auch ein akkubetriebenes Fräswerkzeug zum Dekontaminieren der Betonwände entwickelt. Das Fräswerkzeug hat zwei Freiheitsgrade, den Fräsmotor sowie den Vorschubmotor für die seitliche Positionierung des Fräskopfes. Zu diesem Zweck wurde eine Hebebühne der Firma „Manitou“ mit den notwendigen Komponenten (Steuerung, Aktoren, Sensoren, Sicherheitstechnik und Kommunikationstechnik) ausgestattet. Die Hebebühne kann im Teleoperationsmodus, aber auch im Automatikbetrieb eingesetzt werden.
Als zentrale Steuerung dient eine EtherCAT-basierte speicherprogrammierbare Steuerung (SPS) „CtrlX-Core X3“. Die gesamte Antriebstechnik, Sensorik und Sicherheitstechnik ist auf einer SPS aufgebaut. Neben der SPS verfügt die Plattform über einen Mini-PC mit einer Core-i7-CPU. Auf dem Mini-PC sind die Visualisierungen, Lokalisierungsalgorithmen, die Kommunikation mit dem GammaBot und die Benutzeroberfläche (HMI) programmiert. Damit die Plattform sich selbst im Raum lokalisieren kann, wurden zwei sichere Lidar-Sensoren „Sick-microScan 3“ auf der Plattform montiert. Die Lidar- Sensoren liefern Rohdaten an den Lokalisierungsalgorithmus auf dem Mini-PC, und die approximierten Positionen werden in Form von „UDP“-Nachrichten an die SPS übertragen.
Sicherheitstechnik
Um die Sicherheit der Anwender bei der Bedienung des DekontBots zu gewährleisten, wurde ein Sicherheitssystem für den DekontBot entwickelt. Eine Sicherheits-SPS „Sick-CPU0“ sorgt als zentrale Sicherheitssteuerung dafür, dass das „Freigabe-Signal“ nur im sicheren Zustand erzeugt wird. Ohne Freigabesignal darf sich der DekontBot nicht bewegen und bleibt im Stillstand. Das Sicherheitssystem besteht aus zwei Sicherheits-Lidarsensoren, die in der Lage sind, Personen in der Nähe des DekontBot zu erkennen, zwei Neigungssensoren, die mit unterschiedlichen Messprinzipien funktionieren, um die Neigung des DekontBot zu messen und zwei Sicherheitsschalter mit unterschiedlichen Messprinzipien an jedem Gelenk, um zu wissen, wann sich der Manipulator in der Home-Position befindet. Durch den Einsatz von Sicherheitssensoren mit unterschiedlichen Messprinzipien wird die Messungsungenauigkeit und Fehlerwahrscheinlichkeit deutlich reduziert.
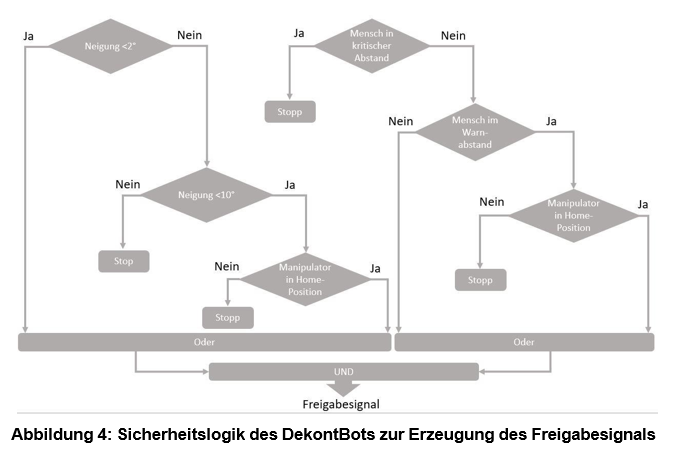
Ein Freigabesignal wird nicht erzeugt, wenn sich ein Mensch in einem kritischen Abstand (Abstand weniger als zwei Meter) zum DekontBot befindet. Befindet sich der Manipulator nicht in der Home- Position und ein Mensch befindet sich in einem kritischen Abstand (Abstand weniger als neun Meter), gibt es ebenfalls kein Freigabesignal. Die Sicherheits-Neigungssensoren sollen verhindern, dass der DekontBot umkippt. Ist der DekontBot um mehr als 10° gekippt oder liegt der Wert zwischen 2° und 10° und befindet sich der Manipulator nicht in der Home-Position, wird der DekontBot nicht freigegeben. Wenn der Neigungswinkel kleiner oder gleich 2° ist, ist der DekontBot sicher, auch wenn sich der Manipulator nicht in der Home-Position befindet. Abbildung 4 zeigt die Sicherheitslogik des DekontBot zur Erzeugung des Freigabesignals.
Benutzeroberfläche, Visualisierung und Kommunikation mit dem GammaBot
Der Dekontaminationsprozess basiert auf der von dem GammaBot erstellten Kontaminationskarte. Anhand dieser Informationen ist der DekontBot in der Lage, die Kontaminationspositionen zu kennen und die Werkzeuge für die Dekontaminations- oder Freimessung dort zu positionieren. Diese Informationen werden automatisch vom GammaBot an den DekontBot über eine TCP-Server/Client- Architektur übertragen. Der Benutzer kann die verfügbaren Karten über die Benutzeroberfläche auswählen oder löschen (Abbildung 5). Der Benutzer kann ebenfalls den DekontBot über die Benutzeroberfläche freigeben oder stoppen.
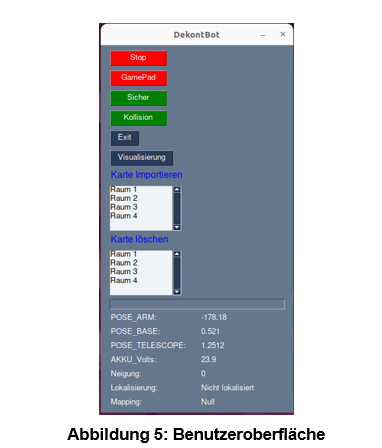
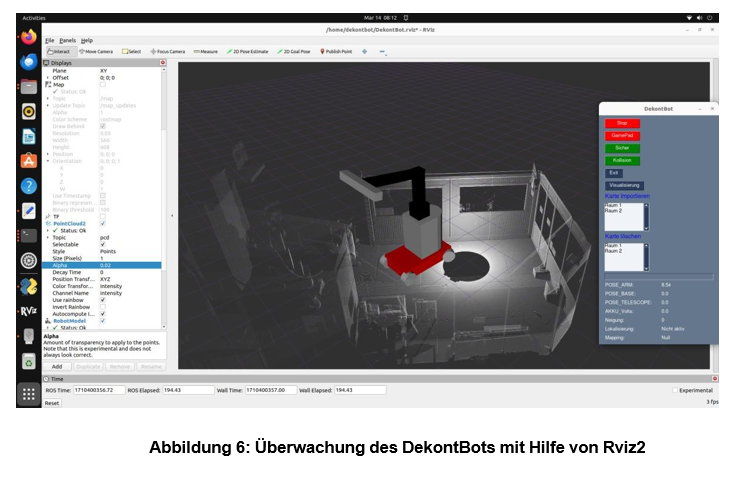
Der Anwender kann außerdem zwischen dem Teleoperationsmodus und dem Automatikmodus wählen. Das Sicherheitsfreigabesignal, die Kollisionsgefahr und andere Messwerte wie Manipulatorgelenkpositionen, Akkuspannung, Lokalisierungsstatus und Cte sind ebenfalls auf der Benutzeroberfläche zu sehen. Die ausgewählte Karte wird dann über Rviz2 auf ROS2 (Robot Operating System) visualisiert. Es besteht die Möglichkeit, die 2D-Karte oder das 3D-Gebäudemodell oder beides zu visualisieren (Abbildung 6).
Ausblick
Bisher sind alle für die Automatisierung erforderlichen Sensoren, Sicherheitssensoren und Aktoren an den Steuerungen angeschlossen. Der Kartenübergang zwischen GammaBot und DekontBot erfolgt automatisch und der Benutzer kann die gesamte Anlage über eine Benutzeroberfläche steuern. Weiterhin müssen alle Komponenten in einem Schaltschrank am DekontBot montiert werden. Als nächstes müssen Bahnplanungsalgorithmen erstellt werden, die automatisch eine optimale Bahn zwischen dem Startpunkt und den Kontaminationspositionen berechnen. Kann die Bahn aufgrund von Gegenständen oder anderen Gründen nicht verwendet werden, sollte eine alternative Bahn zur Verfügung stehen. Der letzte Schritt besteht darin, Regelungsalgorithmen zu implementieren, damit der DecontBot automatisch seiner Trajektorie folgt und die Zielpositionen erreicht.
0 Comments